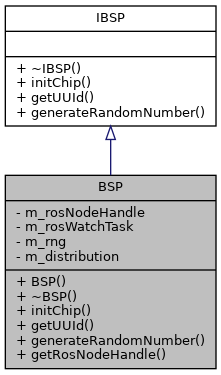
#include <BSP.h>
|
| | BSP () |
| |
| | ~BSP () override |
| |
| void | initChip (void *args) override |
| | Initialise the chip for usage. Needs to be called early in the program. More...
|
| |
| uint16_t | getUUId () const override |
| | Returns the unique id associated with the board. More...
|
| |
| uint32_t | generateRandomNumber () override |
| | Returns a positive random number, uses an hardware RNG if available. More...
|
| |
| std::shared_ptr< ros::NodeHandle > | getRosNodeHandle () |
| |
| virtual | ~IBSP ()=default |
| |
◆ BSP()
◆ ~BSP()
◆ generateRandomNumber()
| uint32_t BSP::generateRandomNumber |
( |
| ) |
|
|
overridevirtual |
Returns a positive random number, uses an hardware RNG if available.
Implements IBSP.
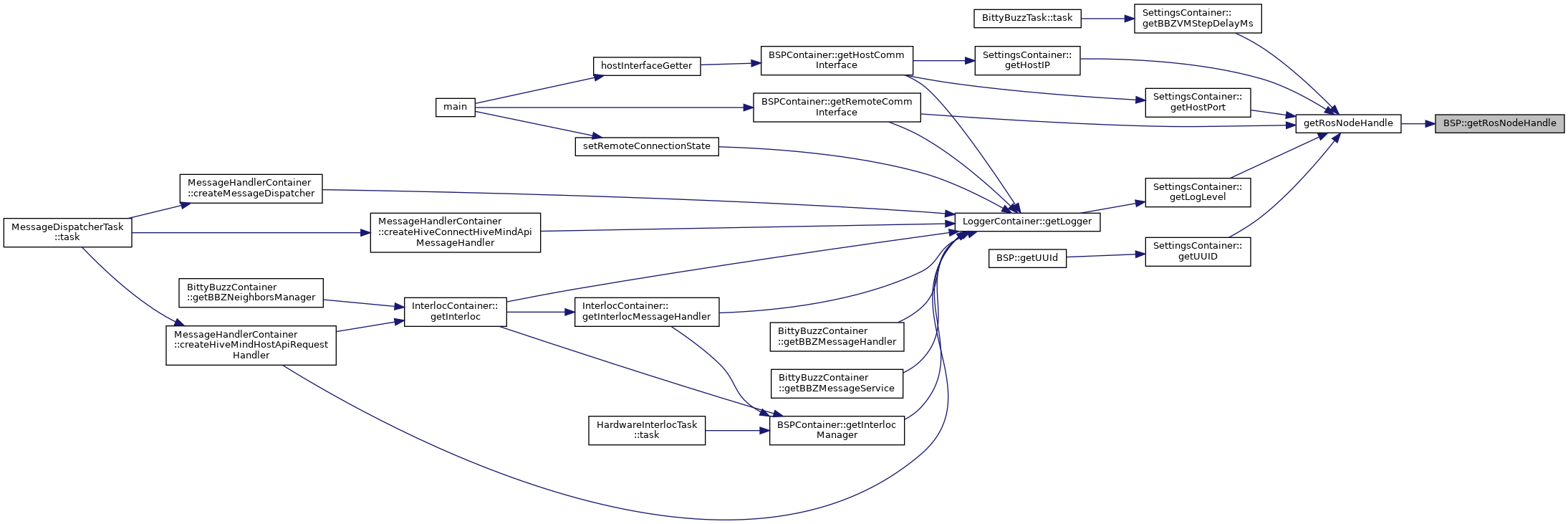
◆ getRosNodeHandle()
| std::shared_ptr< ros::NodeHandle > BSP::getRosNodeHandle |
( |
| ) |
|
◆ getUUId()
| uint16_t BSP::getUUId |
( |
| ) |
const |
|
overridevirtual |
Returns the unique id associated with the board.
Implements IBSP.
◆ initChip()
| void BSP::initChip |
( |
void * |
args | ) |
|
|
overridevirtual |
Initialise the chip for usage. Needs to be called early in the program.
Implements IBSP.
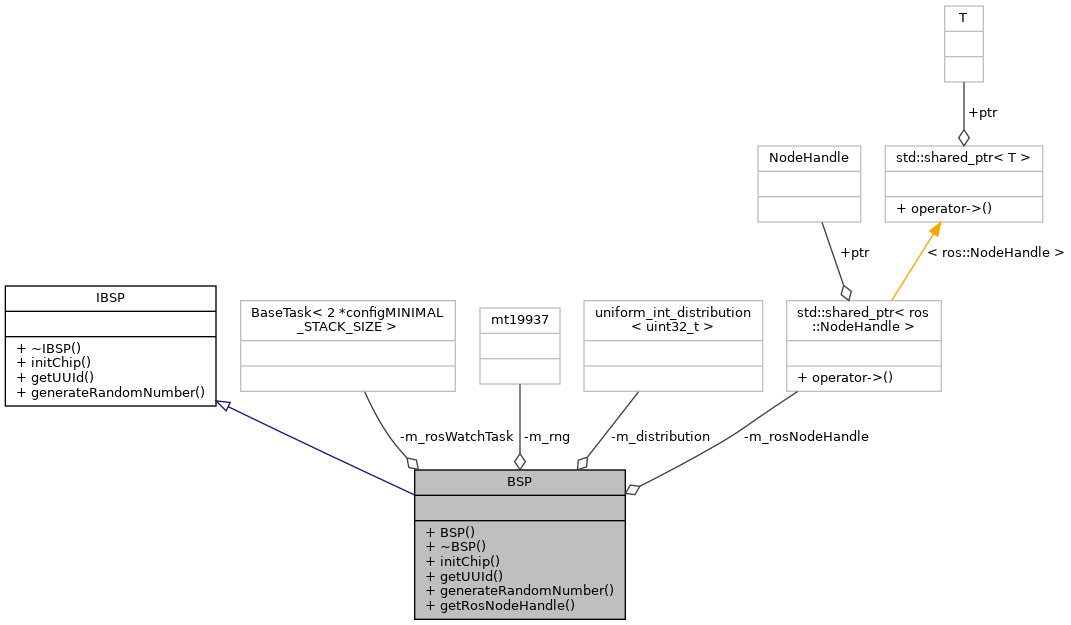
◆ m_distribution
| std::uniform_int_distribution<uint32_t> BSP::m_distribution |
|
private |
◆ m_rng
◆ m_rosNodeHandle
| std::shared_ptr<ros::NodeHandle> BSP::m_rosNodeHandle |
|
private |
◆ m_rosWatchTask
The documentation for this class was generated from the following files:
- src/bsp/src/posix/include/BSP.h
- src/bsp/src/posix/src/BSP.cpp
 Public Member Functions inherited from IBSP
Public Member Functions inherited from IBSP