#include <IInterloc.h>
Inheritance diagram for IInterloc:
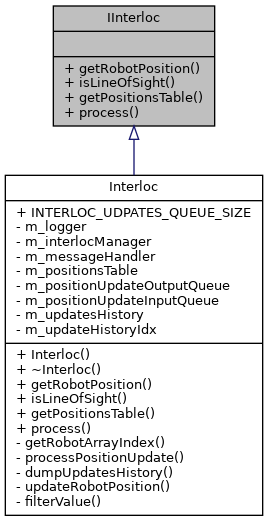
Collaboration diagram for IInterloc:
Public Member Functions | |
| virtual std::optional< RelativePosition > | getRobotPosition (uint16_t robotId) const =0 |
| Returns the last known relative position of a given robot. More... | |
| virtual bool | isLineOfSight (uint16_t robotId) const =0 |
| Tells if a robot is in line of sight. More... | |
| virtual const PositionsTable & | getPositionsTable () const =0 |
| Returns the position table for all robots in the swarm. More... | |
| virtual void | process ()=0 |
| Spins the interloc task checking if any updates happened. Processing them and pushing update values to the output queue. More... | |
Member Function Documentation
◆ getPositionsTable()
|
pure virtual |
Returns the position table for all robots in the swarm.
- Returns
- The position table
Implemented in Interloc.
Here is the caller graph for this function:

◆ getRobotPosition()
|
pure virtual |
Returns the last known relative position of a given robot.
- Parameters
-
robotId The ID of the robot to get the position
- Returns
- The relative position of the robot
Implemented in Interloc.
Here is the caller graph for this function:

◆ isLineOfSight()
|
pure virtual |
Tells if a robot is in line of sight.
- Parameters
-
robotId The ID of the robot to get
- Returns
- Is in line of sight
Implemented in Interloc.
◆ process()
|
pure virtual |
Spins the interloc task checking if any updates happened. Processing them and pushing update values to the output queue.
Implemented in Interloc.
Here is the caller graph for this function:

The documentation for this class was generated from the following file:
- src/interloc/include/interloc/IInterloc.h
