#include <IInterlocManager.h>
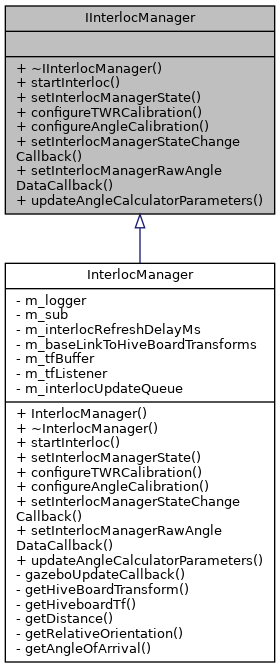
Inheritance diagram for IInterlocManager:
Collaboration diagram for IInterlocManager:
Public Member Functions | |
| virtual | ~IInterlocManager ()=default |
| virtual void | startInterloc ()=0 |
| Dummy function to demonstrate working DW1000s. More... | |
| virtual void | setInterlocManagerState (InterlocStateDTO state)=0 |
| virtual void | configureTWRCalibration (uint16_t distanceCalibCm)=0 |
| Sets the targeted distance for calibration. More... | |
| virtual void | configureAngleCalibration (uint32_t numberOfFrames)=0 |
| Sets the number of frames to accumulate when in angle calibration mode. More... | |
| virtual void | setInterlocManagerStateChangeCallback (interlocManagerStateChangeCallbackFunction_t callback, void *context)=0 |
| virtual void | setInterlocManagerRawAngleDataCallback (interlocRawAngleDataCallbackFunction_t callback, void *context)=0 |
| virtual void | updateAngleCalculatorParameters (const ConfigureAngleParametersDTO &newParams)=0 |
Constructor & Destructor Documentation
◆ ~IInterlocManager()
|
virtualdefault |
Member Function Documentation
◆ configureAngleCalibration()
|
pure virtual |
Sets the number of frames to accumulate when in angle calibration mode.
- Parameters
-
numberOfFrames Number of frames to accumulate
Implemented in InterlocManager.
Here is the caller graph for this function:

◆ configureTWRCalibration()
|
pure virtual |
Sets the targeted distance for calibration.
- Parameters
-
distanceCalibCm Distance between the devices in calibration mode
Implemented in InterlocManager.
Here is the caller graph for this function:

◆ setInterlocManagerRawAngleDataCallback()
|
pure virtual |
Sets the callback to call when a raw angle data is sent back to the PC
- Parameters
-
callback Callback context Context to pass the callback
Implemented in InterlocManager.
Here is the caller graph for this function:

◆ setInterlocManagerState()
|
pure virtual |

◆ setInterlocManagerStateChangeCallback()
|
pure virtual |
Sets the callback to call when a state change occurs in the interloc manager
- Parameters
-
callback Callback context Context to pass the callback
Implemented in InterlocManager.
Here is the caller graph for this function:

◆ startInterloc()
|
pure virtual |
Dummy function to demonstrate working DW1000s.
Implemented in InterlocManager.
Here is the caller graph for this function:

◆ updateAngleCalculatorParameters()
|
pure virtual |
Updates the parameters used to calculate an angle
- Parameters
-
newParams DTO to save as new parameters
Implemented in InterlocManager.
Here is the caller graph for this function:

The documentation for this class was generated from the following file:
- src/bsp/include/bsp/IInterlocManager.h
