#include <InterlocManager.h>
|
| static tf2::Stamped< tf2::Transform > | getHiveboardTf (const geometry_msgs::Pose &poseWorldFrame, const geometry_msgs::TransformStamped &hiveboardToRobotTf) |
| |
| static double | getDistance (const tf2::Transform &transform) |
| |
| static double | getRelativeOrientation (const tf2::Transform &transform) |
| |
| static double | getAngleOfArrival (const tf2::Transform &agentToAgentTransform) |
| |
◆ InterlocManager()
| InterlocManager::InterlocManager |
( |
ILogger & |
logger, |
|
|
INotificationQueue< InterlocUpdate > & |
interlocUpdateQueue |
|
) |
| |
◆ ~InterlocManager()
| InterlocManager::~InterlocManager |
( |
| ) |
|
|
overridedefault |
◆ configureAngleCalibration()
| void InterlocManager::configureAngleCalibration |
( |
uint32_t |
numberOfFrames | ) |
|
|
overridevirtual |
Sets the number of frames to accumulate when in angle calibration mode.
- Parameters
-
| numberOfFrames | Number of frames to accumulate |
Implements IInterlocManager.
◆ configureTWRCalibration()
| void InterlocManager::configureTWRCalibration |
( |
uint16_t |
distanceCalibCm | ) |
|
|
overridevirtual |
Sets the targeted distance for calibration.
- Parameters
-
| distanceCalibCm | Distance between the devices in calibration mode |
Implements IInterlocManager.
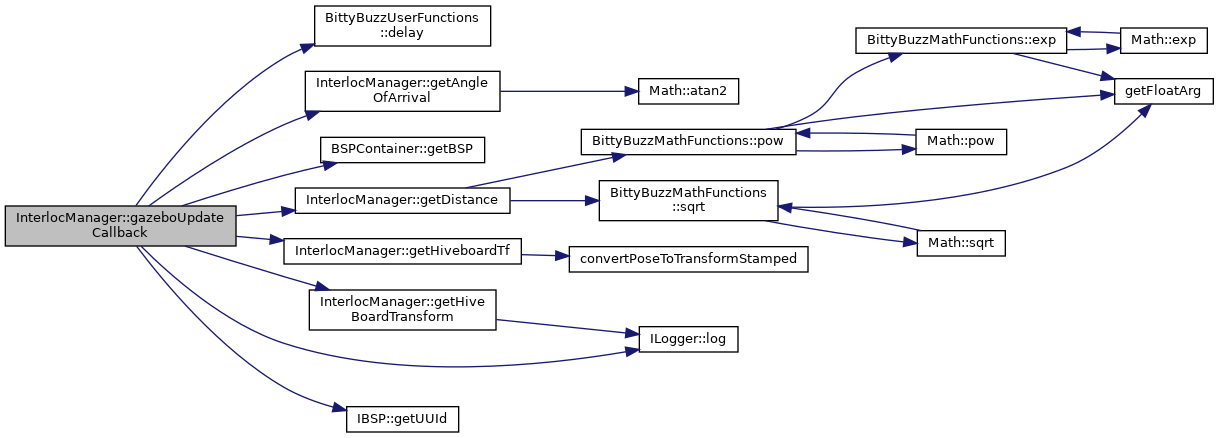
◆ gazeboUpdateCallback()
| void InterlocManager::gazeboUpdateCallback |
( |
const gazebo_msgs::ModelStates & |
msg | ) |
|
|
private |
◆ getAngleOfArrival()
| double InterlocManager::getAngleOfArrival |
( |
const tf2::Transform & |
agentToAgentTransform | ) |
|
|
staticprivate |
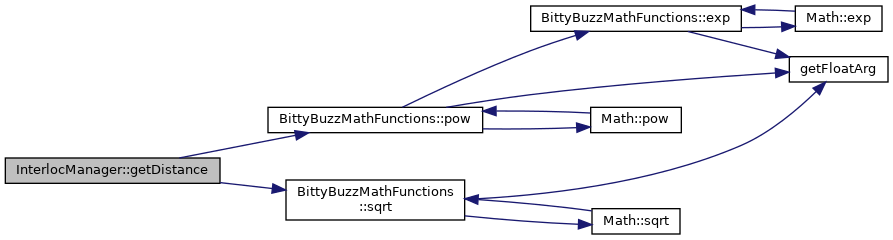
◆ getDistance()
| double InterlocManager::getDistance |
( |
const tf2::Transform & |
transform | ) |
|
|
staticprivate |
◆ getHiveboardTf()
| tf2::Stamped< tf2::Transform > InterlocManager::getHiveboardTf |
( |
const geometry_msgs::Pose & |
poseWorldFrame, |
|
|
const geometry_msgs::TransformStamped & |
hiveboardToRobotTf |
|
) |
| |
|
staticprivate |
◆ getHiveBoardTransform()
| std::optional< geometry_msgs::TransformStamped > InterlocManager::getHiveBoardTransform |
( |
const std::string & |
agentName | ) |
|
|
private |
◆ getRelativeOrientation()
| static double InterlocManager::getRelativeOrientation |
( |
const tf2::Transform & |
transform | ) |
|
|
staticprivate |
◆ setInterlocManagerRawAngleDataCallback()
Sets the callback to call when a raw angle data is sent back to the PC
- Parameters
-
| callback | Callback |
| context | Context to pass the callback |
Implements IInterlocManager.
◆ setInterlocManagerState()
| void InterlocManager::setInterlocManagerState |
( |
InterlocStateDTO |
state | ) |
|
|
overridevirtual |
◆ setInterlocManagerStateChangeCallback()
Sets the callback to call when a state change occurs in the interloc manager
- Parameters
-
| callback | Callback |
| context | Context to pass the callback |
Implements IInterlocManager.
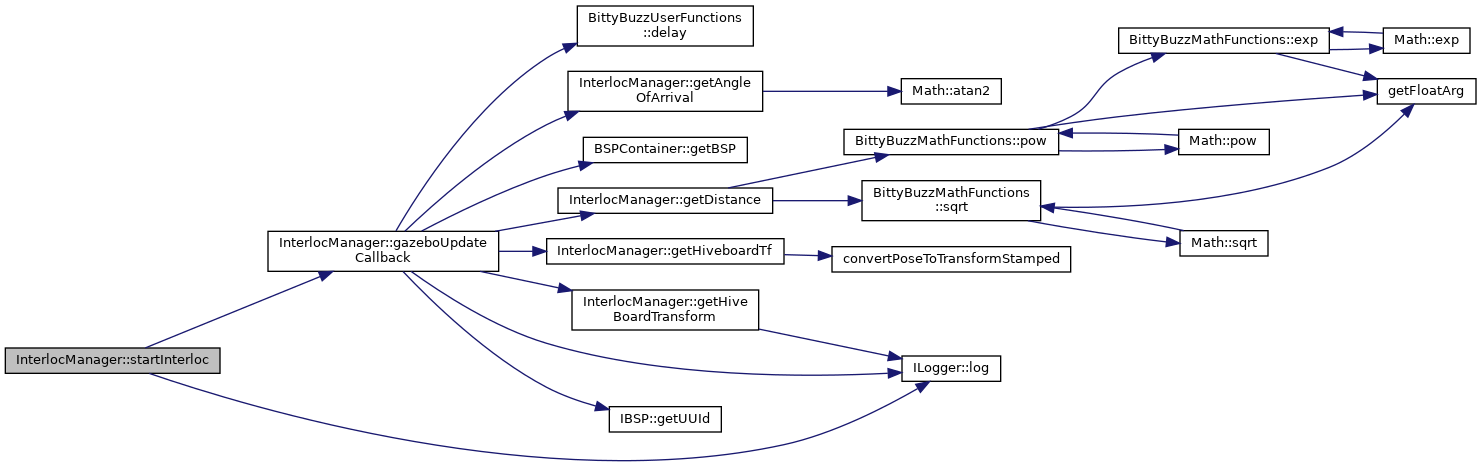
◆ startInterloc()
| void InterlocManager::startInterloc |
( |
| ) |
|
|
overridevirtual |
◆ updateAngleCalculatorParameters()
| void InterlocManager::updateAngleCalculatorParameters |
( |
const ConfigureAngleParametersDTO & |
newParams | ) |
|
|
overridevirtual |
Updates the parameters used to calculate an angle
- Parameters
-
| newParams | DTO to save as new parameters |
Implements IInterlocManager.
◆ m_baseLinkToHiveBoardTransforms
| std::map<uint16_t, geometry_msgs::TransformStamped> InterlocManager::m_baseLinkToHiveBoardTransforms |
|
private |
◆ m_interlocRefreshDelayMs
| uint InterlocManager::m_interlocRefreshDelayMs |
|
private |
◆ m_interlocUpdateQueue
| INotificationQueue<InterlocUpdate>& InterlocManager::m_interlocUpdateQueue |
|
private |
◆ m_logger
◆ m_sub
| ros::Subscriber InterlocManager::m_sub |
|
private |
◆ m_tfBuffer
| tf2_ros::Buffer InterlocManager::m_tfBuffer |
|
private |
◆ m_tfListener
| tf2_ros::TransformListener InterlocManager::m_tfListener |
|
private |
The documentation for this class was generated from the following files:
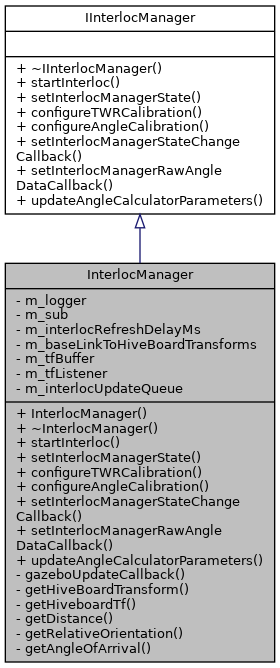
 Public Member Functions inherited from IInterlocManager
Public Member Functions inherited from IInterlocManager